Rosy D. Chen

dingdinc[at]andrew.cmu.edu
I am a 2nd-year Masters of Computer Science (MsCS) student at Carnegie Mellon University. I do robotics research at the Robotics Institute advised by Prof. Michael Kaess. I also had the pleasure of working with Prof. Andrea Bajcsy on safety-aware and preference-aligned human-robot interaction. During my undergrad at Harvey Mudd College, I worked with Prof. Jim Boerkoel on scheduling for human-robot collaboration.
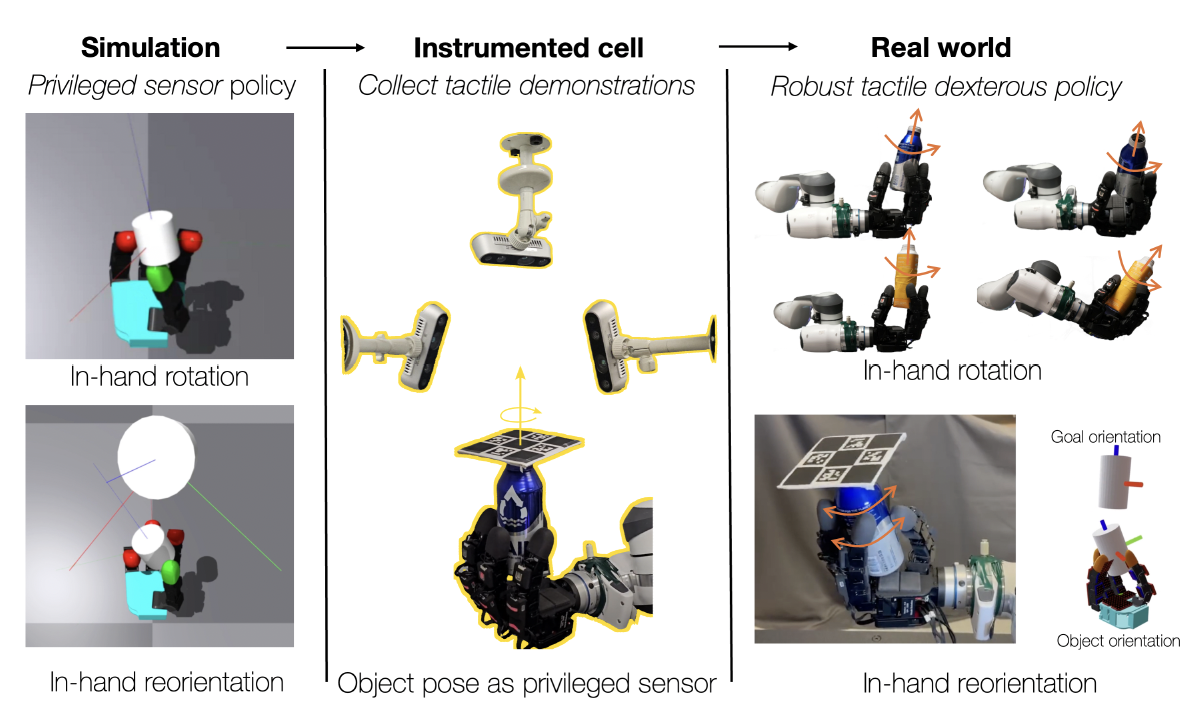
My current research focuses on tactile sensing and dexterous manipulation. Specifically, I explore how to best leverage rich tactile information for fine manipulation tasks, enabling robotic hands to perform complex behaviors such as in-hand rotation and object re-orientation on hardware using tactile signals.
Previously, I investigated uncertainty quantification in human-robot interaction through approaches including human preference modeling via contrastive learning and modeling human uncertainty in graphical representations of scheduling problems.
My overarching goal is to teach robots new skills by identifying the most effective ways to utilize available sensory and input modalities.
Other than robots, I also love mountains, rocks, and a good run. My best friend and I spend a week each year to climb a couple 14ers in Colorado. I climb some rocks inside or outside and run on gravel and trails.
news
| Mar 04, 2026 | Our paper PTLD: Sim-to-real Privileged Tactile Latent Distillation for Dexterous Manipulation is now on ArVix |
|---|---|
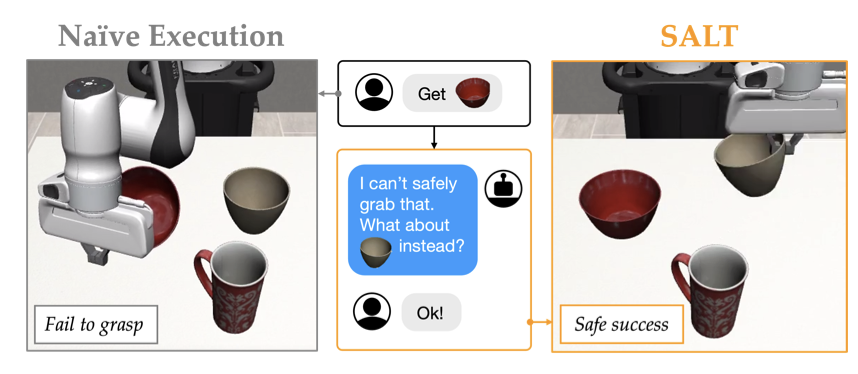
| Aug 31, 2025 | Our paper Robot that Suggests Safe Alternatives was accepted to IROS 2025 |
| May 13, 2024 | I graudated from Harvey Mudd Collage and will start my Masters in Computer Science at Carnegie Mellon Univeristy! |
| Oct 22, 2023 | My first paper Sensitivity Analysis for Dynamic Control of PSTNs with Skewed Distributions published at ICAPS 2023 ! |
selected publications
- ArVix
- IROS
- ICAPS
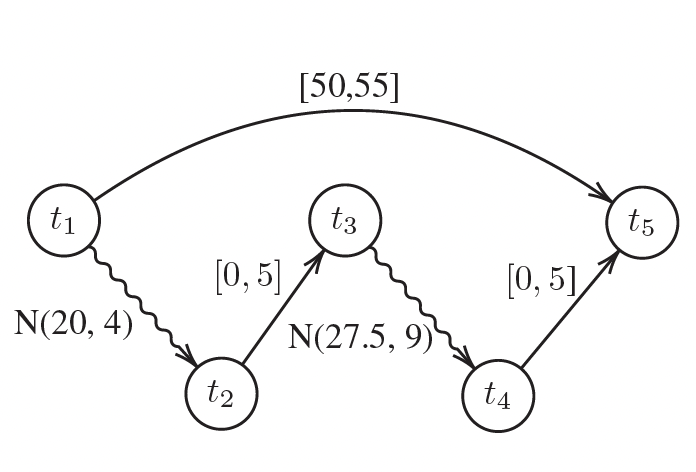 Sensitivity analysis for dynamic control of pstns with skewed distributionsIn Proceedings of the International Conference on Automated Planning and Scheduling, 2023
Sensitivity analysis for dynamic control of pstns with skewed distributionsIn Proceedings of the International Conference on Automated Planning and Scheduling, 2023